I am a Research Scientist in the Seattle Research Lab (SRL) at NVIDIA Research led by Dieter Fox. Previously, I received my Ph.D. from the Robotics Institute at Carnegie Mellon University. I obtained my B.A.Sc. in Engineering Science from University of Toronto, with a major in Aerospace Engineering and a minor in Robotics and Mechatronics.
I am generally interested in reasoning about human intention and behavior given arbitrary task spaces for the purposes of continuous human robot interaction. Currently exploring reasoning and interaction for manipulators. Previously, I worked on human intention modeling and prediction for continuous human-in-the-loop control of aerial and ground robots and agile safe navigation in unknown and unstructured environments. My areas of focus are robot system design, navigation, task representation, human robot interaction.
You can contact me at xuningy at nvidia dot com.
Thesis
- Human-in-the-loop Planning for Mobile Robots PhD Thesis, Robotics Institute, Carnegie Mellon University, Jan 2022 [bibtex] [pdf (33.4MB)] [talk]
Publications
-
Continuous Dynamic Autonomy via Path Prediction on Semantic Topological Maps Xuning Yang, Jean Oh Submitted to the International Conference on Intelligent Robots and Systems (IROS), 2022 [pdf] [video]
-
An Intention Guided Hierarchical Framework for Trajectory-based Teleoperation of Mobile Robots Xuning Yang, Jasmine Cheng, and Nathan Michael International Conference on Robotics and Automation (ICRA), 2021 [bibtex] [pdf] [code] [talk] [gif]

-
An imminent collision monitoring system with safe stopping interventions for autonomous aerial flights Jasmine Cheng, Xuning Yang, and Nathan Michael ICRA 2021 Workshop on “Resilient and Long-Term Autonomy for Aerial Robotic Systems”, Spotlight Talk [bibtex] [pdf]
-
Assisted Mobile Robot Teleoperation with Intent-aligned Trajectories via Biased Incremental Action Sampling Xuning Yang and Nathan Michael International Conference on Intelligent Robots and Systems (IROS), October 2020 [bibtex] [pdf] [code] [talk] [gif]
-
Fast and Agile Vision-Based Flight with Teleoperation and Collision Avoidance on a Multirotor Alexander Spitzer*, Xuning Yang*, John Yao, Aditya Dhawale, Kshitij Goel, Mosam Dabhi, Matt Collins, Curtis Boirum, and Nathan Michael International Symposium on Experimental Robotics (ISER), November 2018 [bibtex] [pdf] [video] [sim/real gifs]
-
Reactive Collision Avoidance using Real-Time Local Gaussian Mixture Model Maps Aditya Dhawale, Xuning Yang, and Nathan Michael International Conference on Intelligent Robots and Systems (IROS), October 2018 [bibtex] [pdf] [gif]
-
Online adaptive teleoperation via motion primitives for mobile robots Xuning Yang, Ayush Agrawal, Koushil Sreenath, and Nathan Michael Special Issue on Learning for Human-Robot Collaboration, Autonomous Robots, April 2018 [bibtex] [pdf]
-
A Framework for Efficient Teleoperation via Online Adaptation Xuning Yang, Koushil Sreenath, and Nathan Michael International Conference on Robotics and Automation (ICRA), May 2017 [bibtex] [pdf] [gif]
-
Online Adaptive Teleoperation via Incremental Intent Modeling Xuning Yang, Koushil Sreenath, and Nathan Michael Late Breaking Report, International Conference on Human-Robot Interaction (HRI), March 2017 [bibtex] [pdf]
Other projects
- In-place hover-to-hover flip of a quadrotor, featured in Rapyuta Robotics Ltd. Teaser video
[gif]

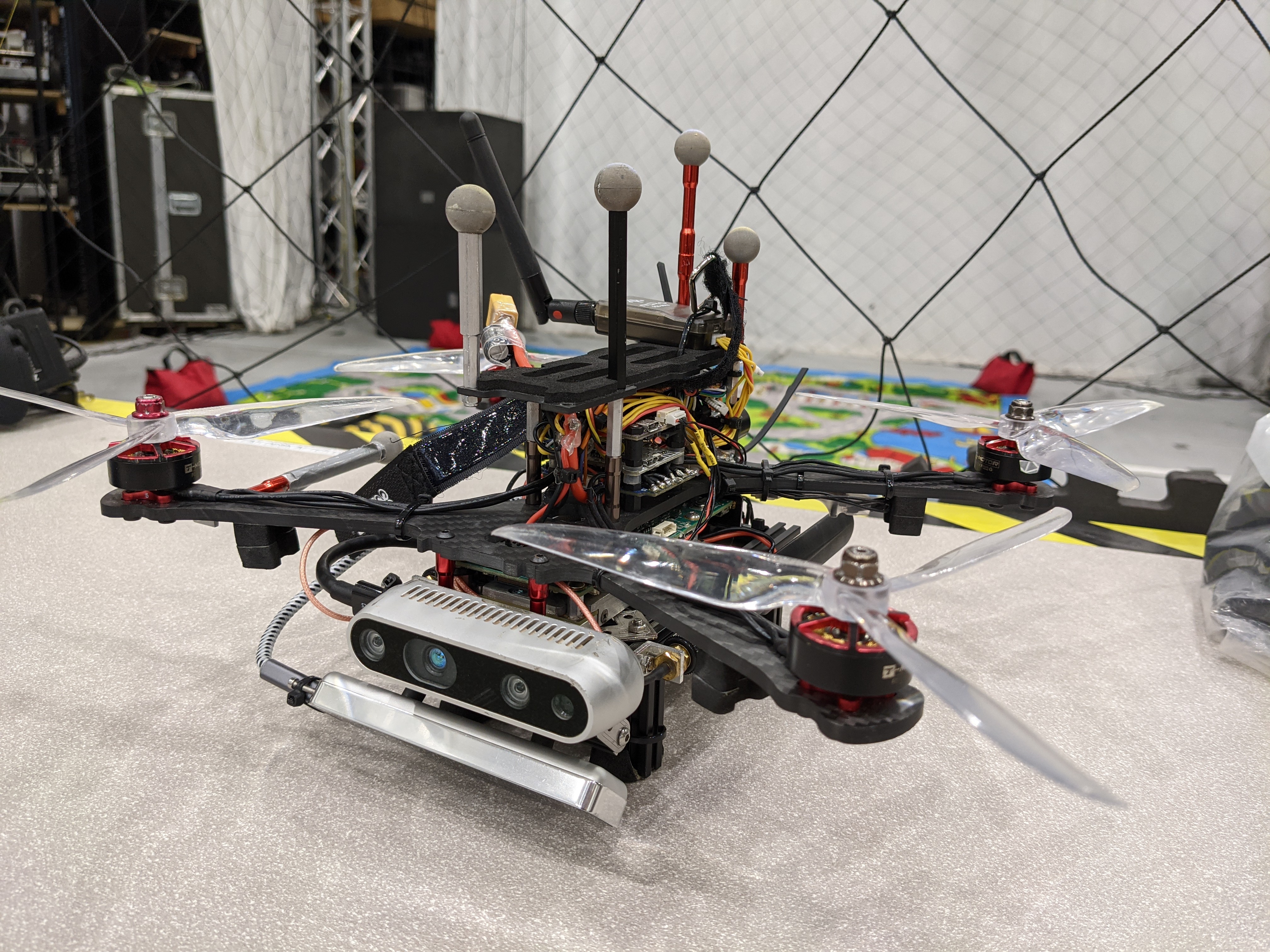
Robots
I enjoy building robots. Some of the robots that are near and dear to my heart are listed here.