Components
| Frame | Armattan Chameleon Ti 6 inch |
| Flight Controller | mRo Pixracer |
| ESCs | Lumenier BLHeli32 4 in 1 ESC |
| Motors | T-Motor F80 Pro 1900kv |
| Props | Dalprop 7in 3 blade clear |
| Power Distribution Board | Holybro Micro Power Module (PM06) |
| Power | Lumenier N2O 1500mAh 4s 120c Lipo Battery |
| Comm | Zigbee Radio |
| Onboard Compute | Nvidia Jetson TX2 with Auvidea J121 Carrier Board |
| State Estimation | Intel RealSense T265 Tracking Camera |
| Depth Sensor | Intel RealSense D435 Depth Camera |
| RC Enabled | Yes |
Gallery


Project
For the hardware vehicle, Alex wrote most of the firmware, ESCs, flight controller, comm, data wiring, and safety protocols. Curt did most of the component sourcing, initial mechanical development, electrical wiring, power management, TX2/J121 setup, and RC. I designed and built most of the chassis, component placement, and worked on integrating the two Intel sensors to our code stack.
We used this vehicle to run a variety of experiments, including high speed control experiments and HITL control with collision avoidance. A modified version of this vehicle with GPS was able to achieve 17m/s outdoors autonomously.
System
Chassis
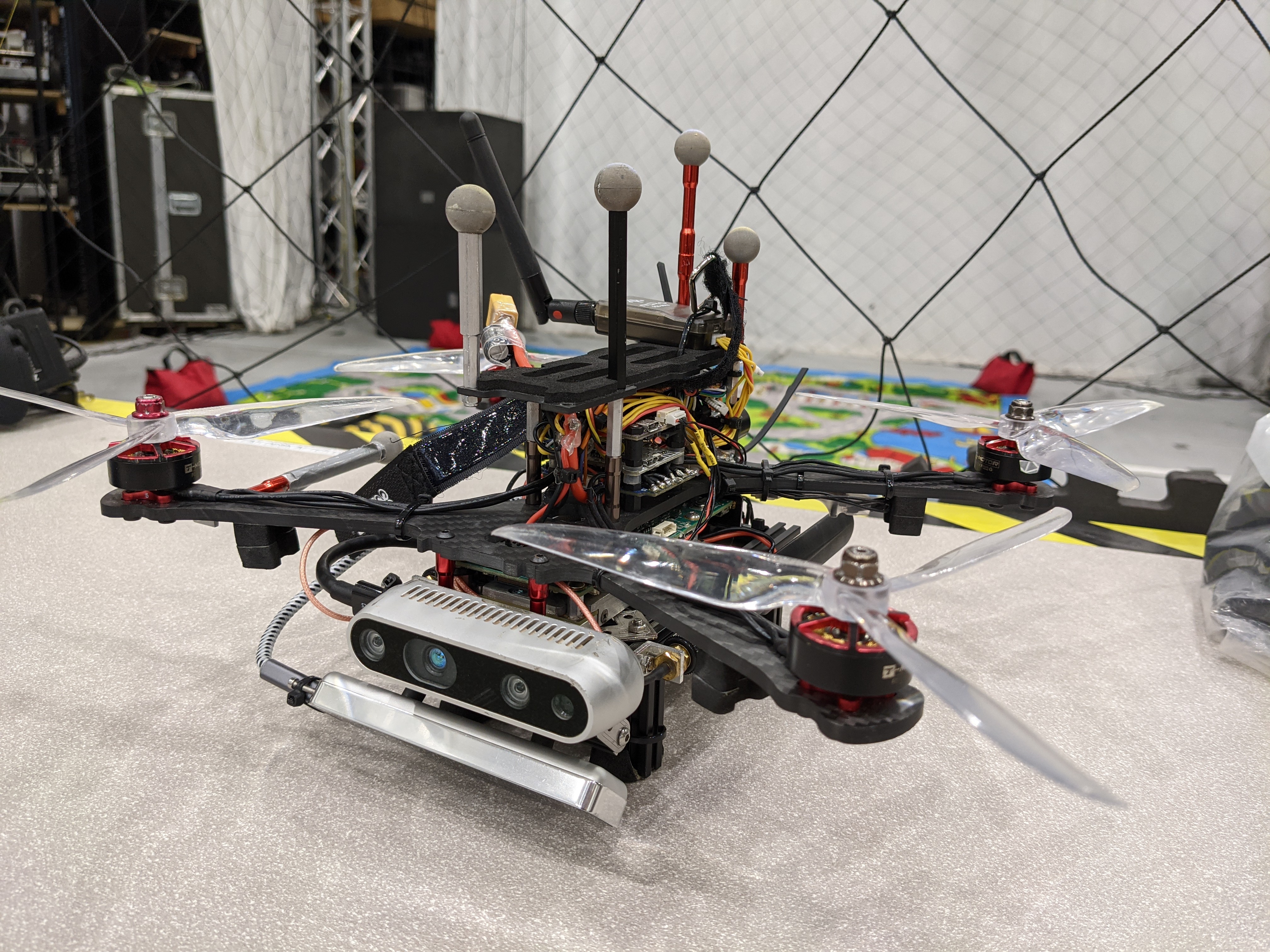
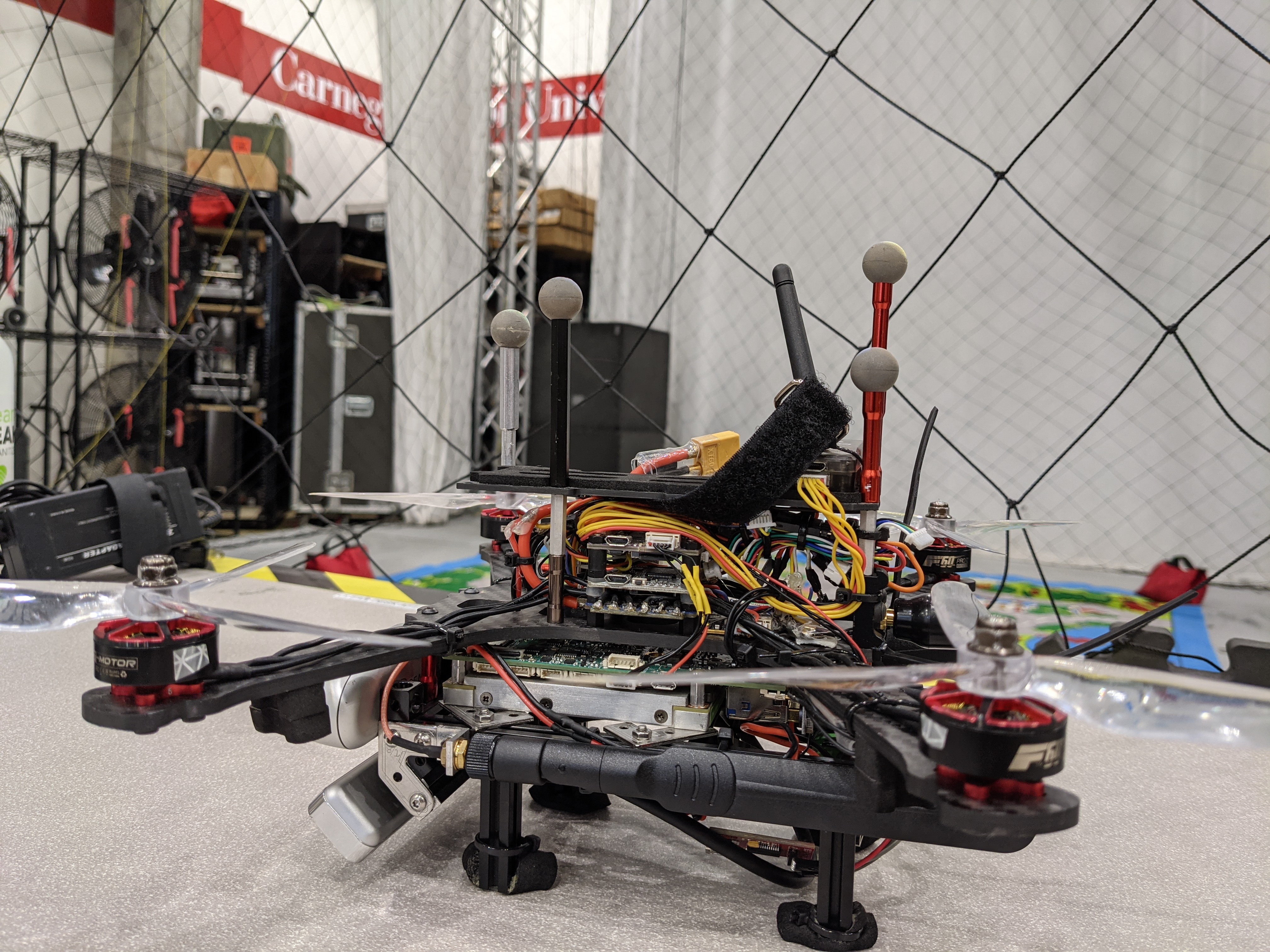
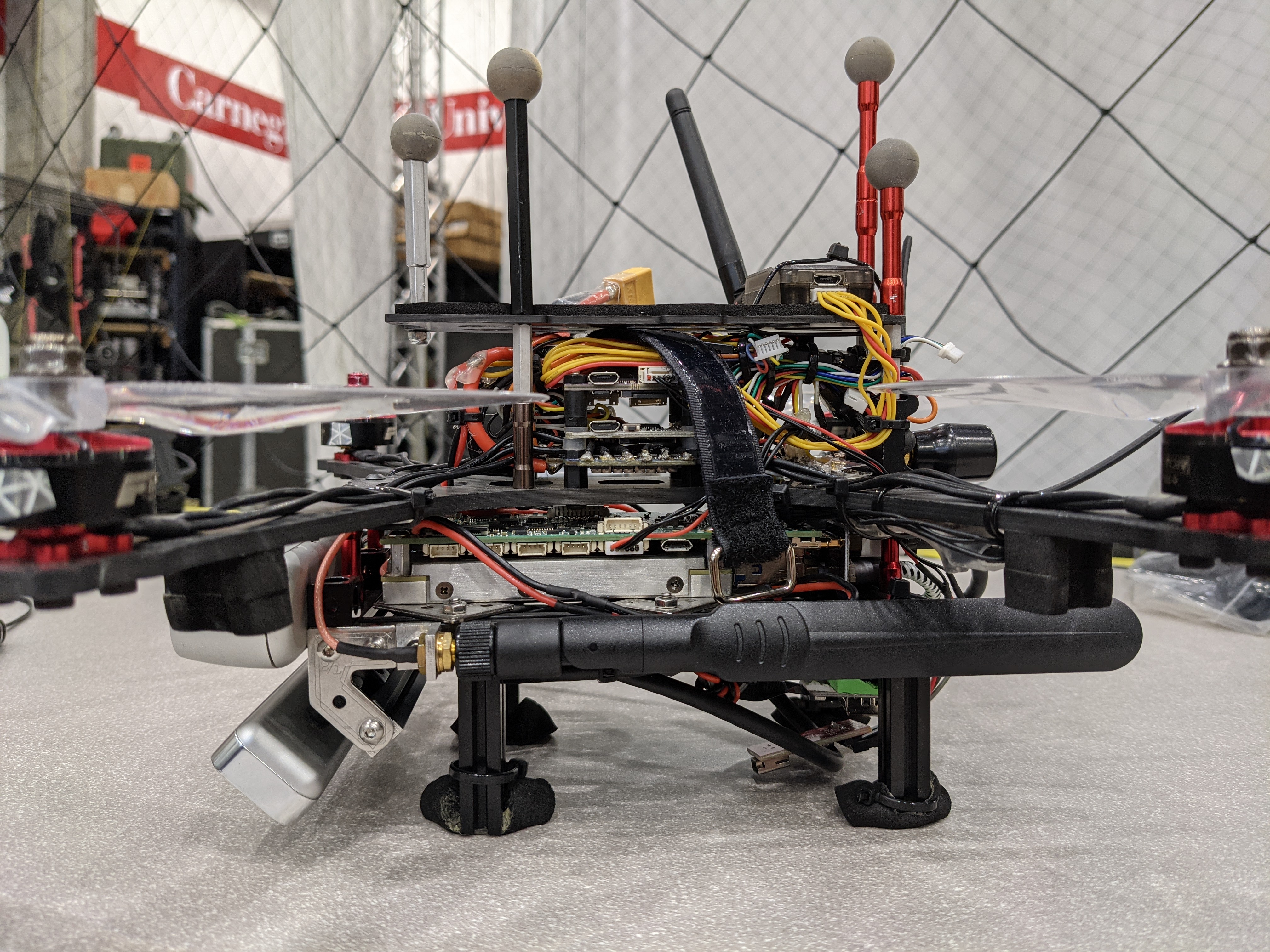
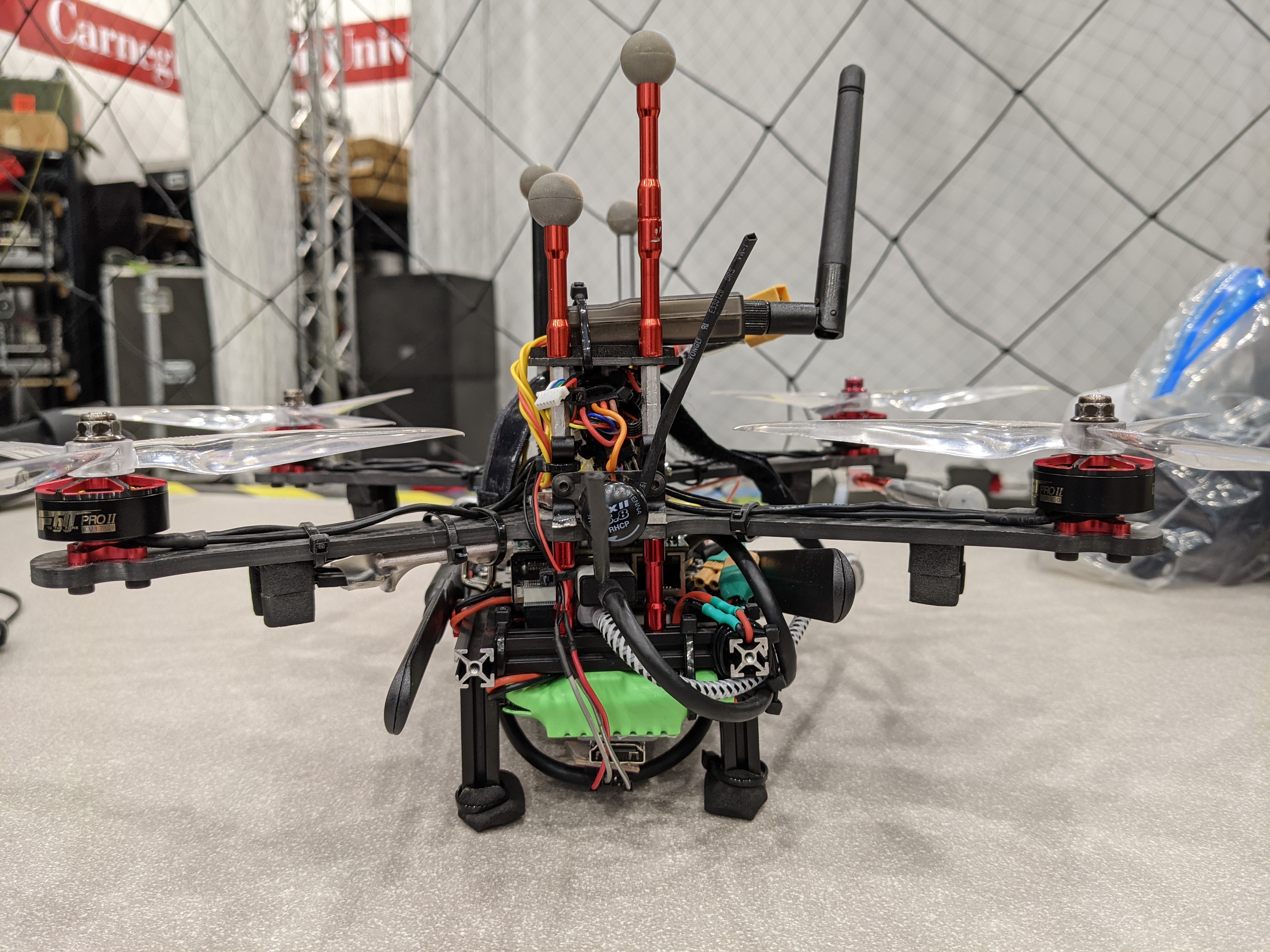
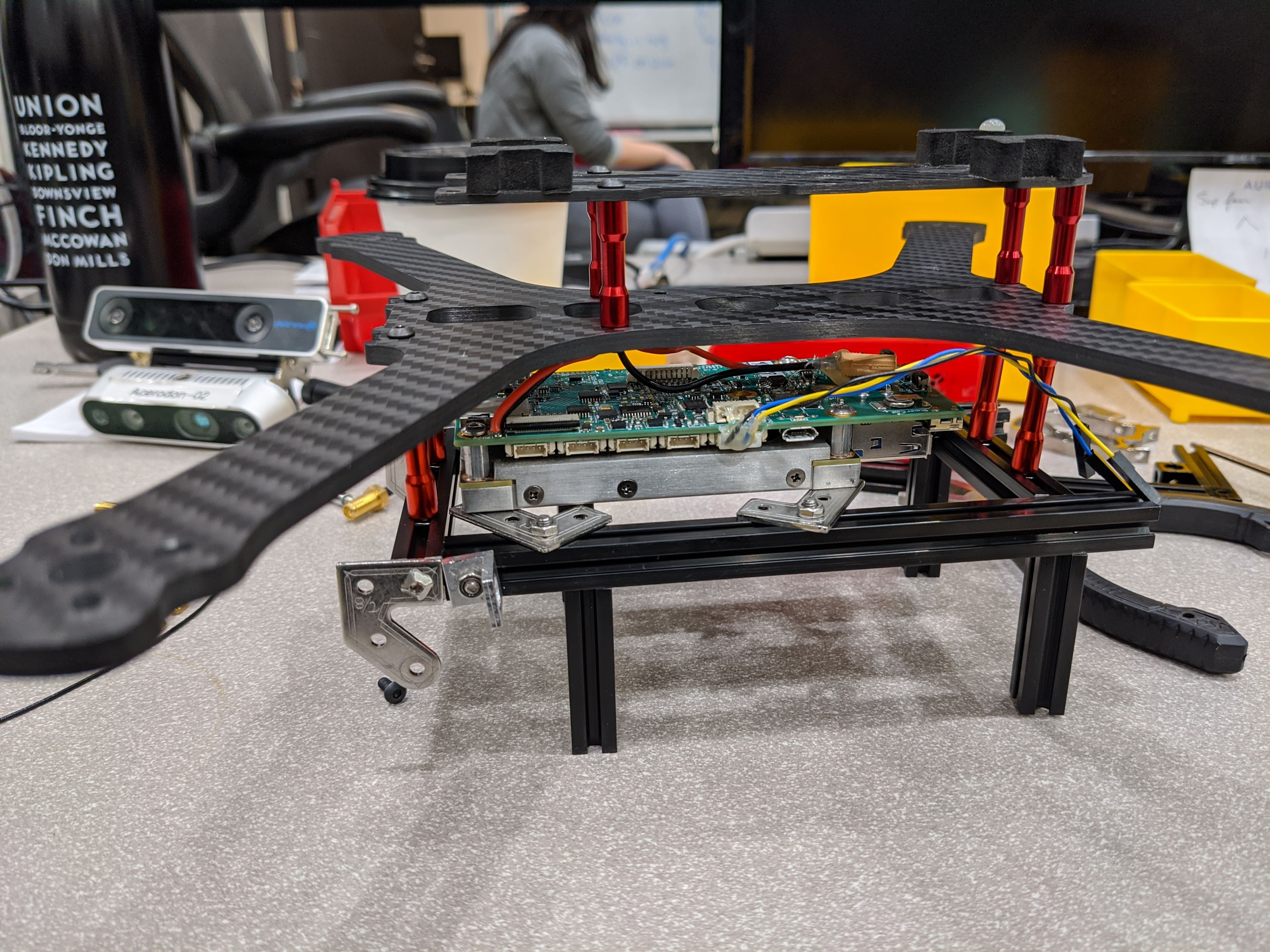
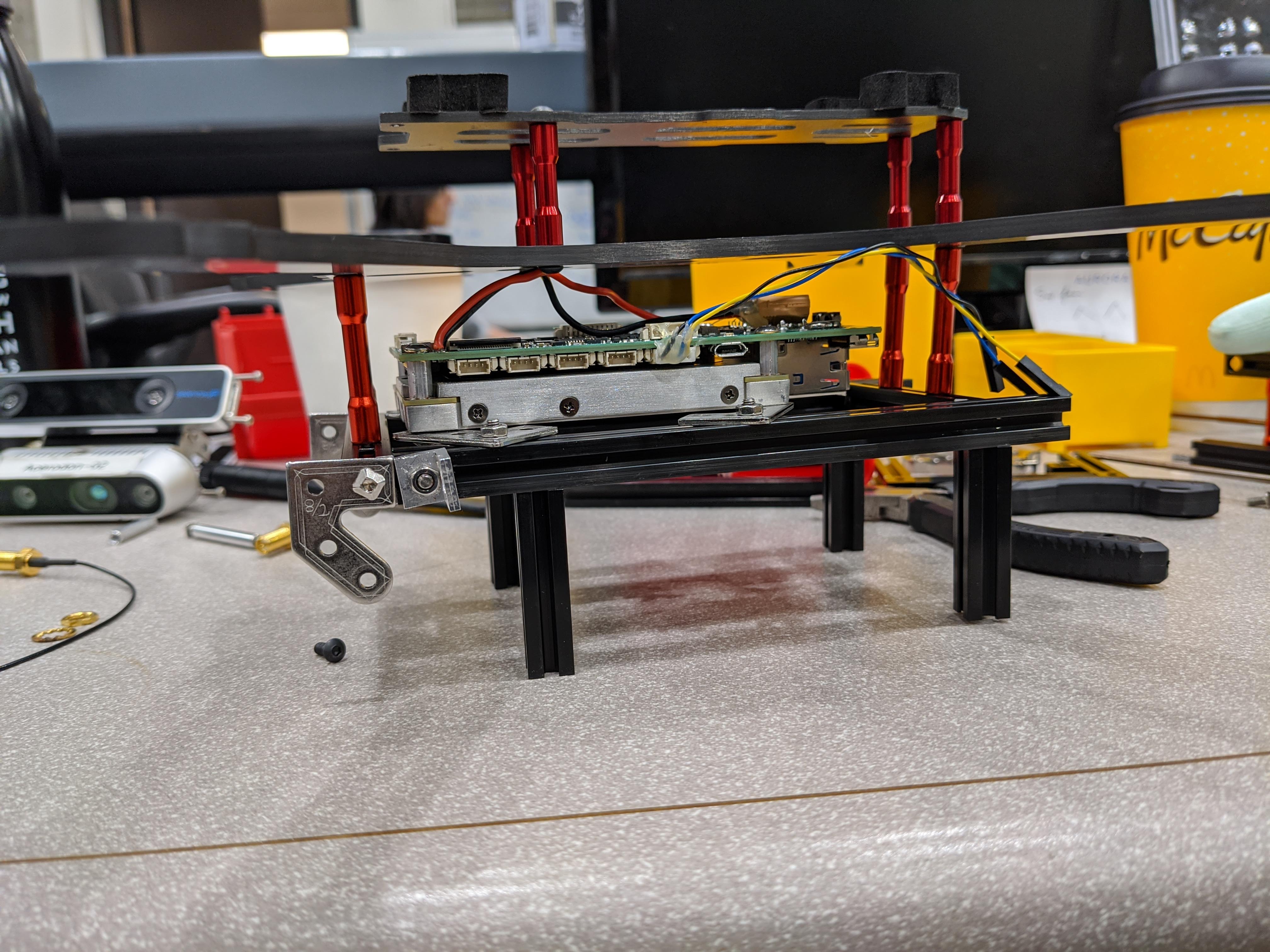
The vehicle uses an Armattan Chameleon Ti 6 inch mount. For our purposes, we remove the FPV camera mount and the back radio mount, and instead use additional standoffs to hold the upper plate to the base plate, allowing for a higher stack height and reduces unnecessary weight. In order to house the onboard compute components and sensors, we add a square base chassis attached below the Armattan base frame, which is attached via additional standoffs.
Motors + Prop
The motors are T-Motor F80 Pro 1900kv equipped with 7 inch 3-blade dalprop propellers.
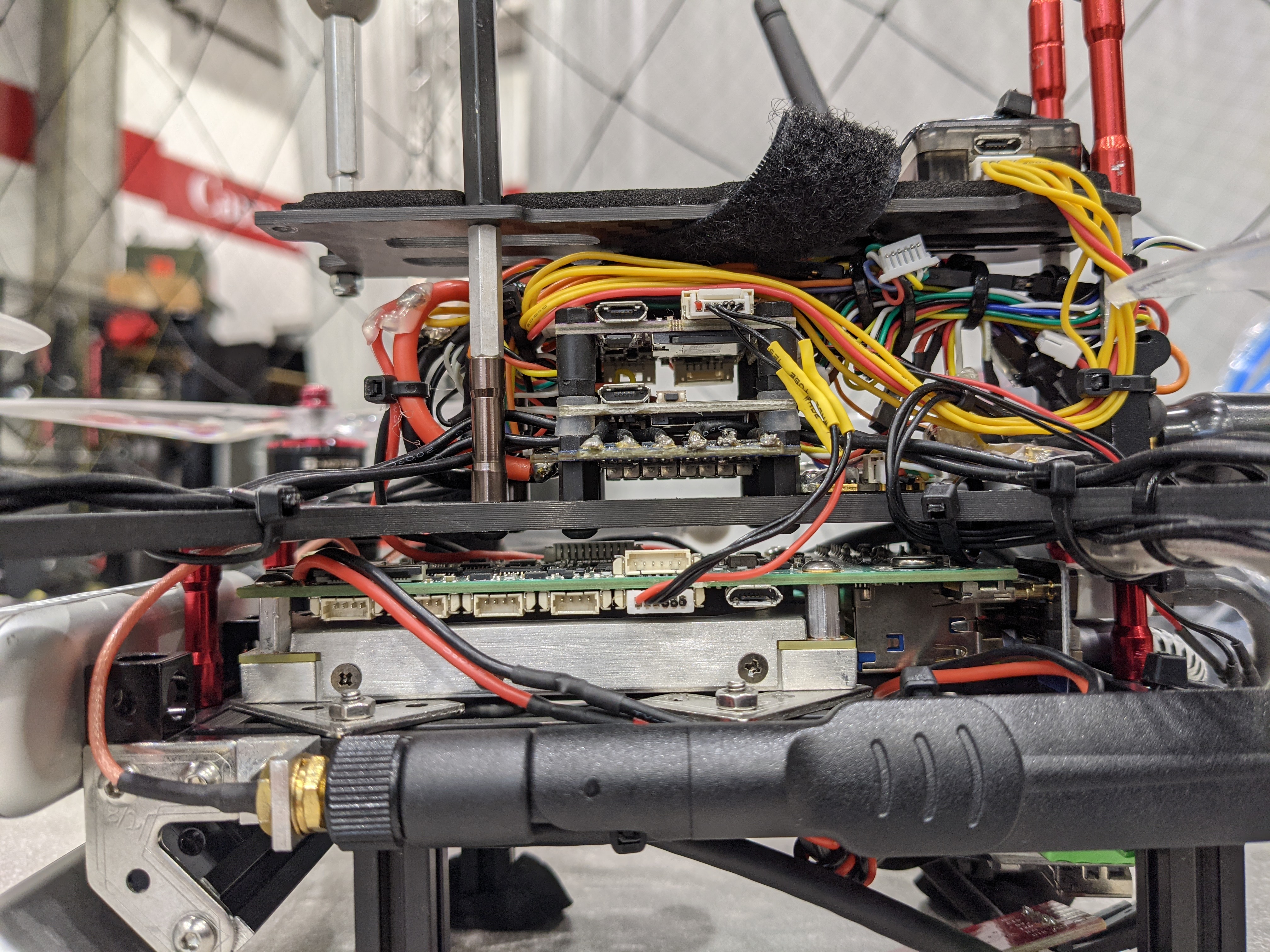
Electronics
The flight controller is an mRo Pixracer connected to a 4-in-1 Lumenier BLHeli32. Power to the vehicle is supplied via a Holybro Micro Power Module. A 4S 1500mAh battery is used to supply power to both the onboard computer and the flight electronics.
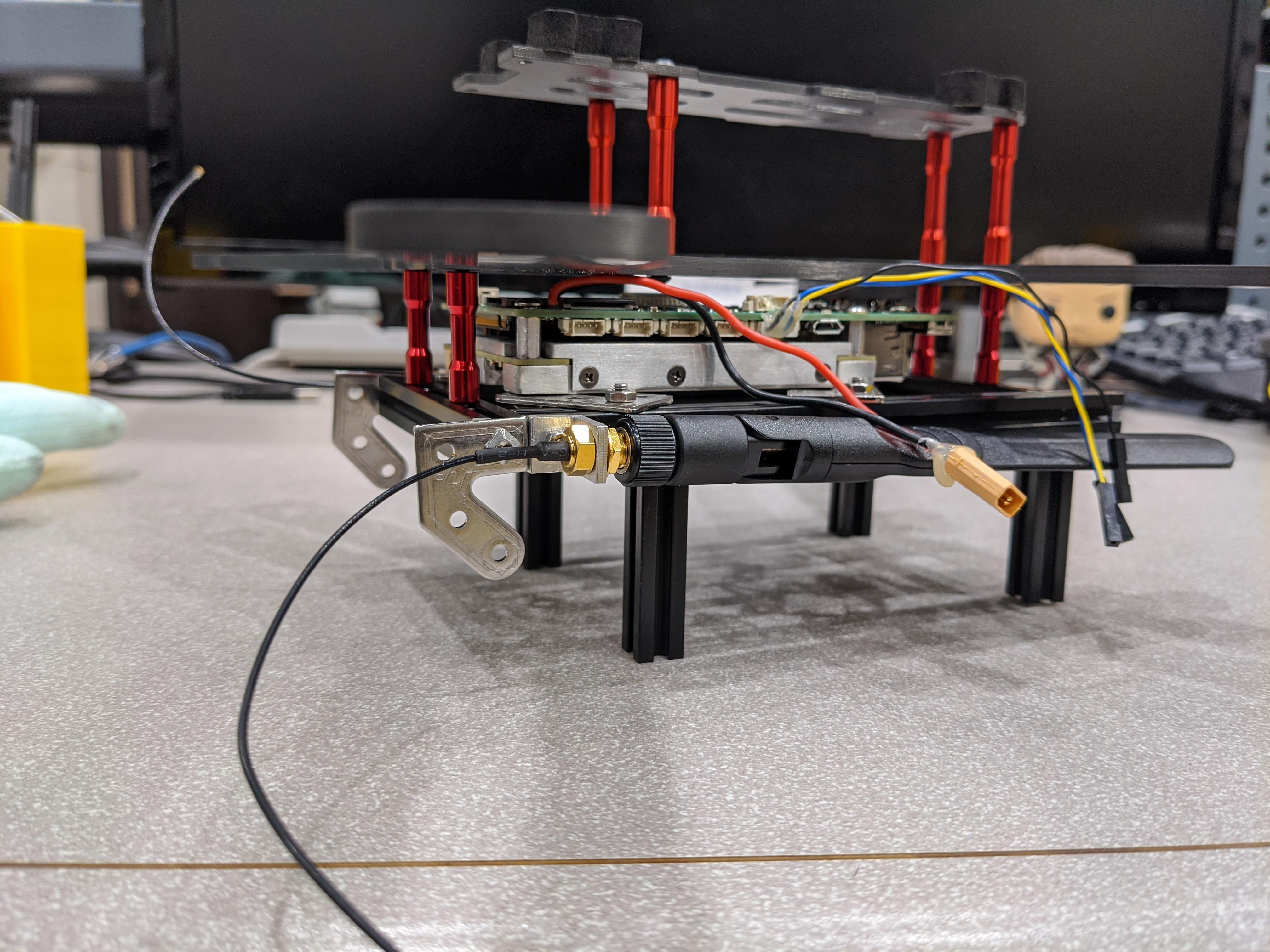
Onboard Compute and sensing
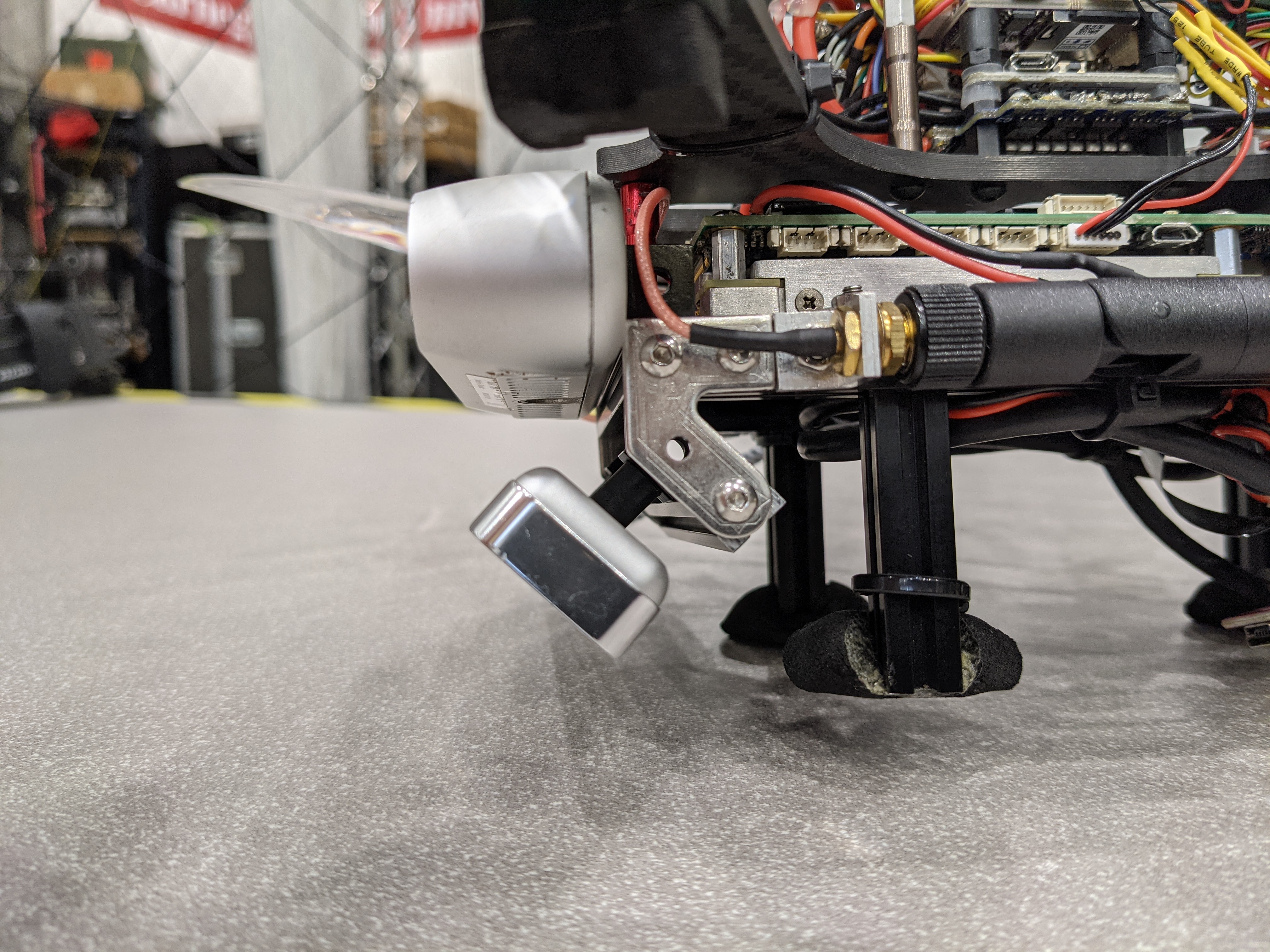
The vehicle is equipped with a Nvidia Jetson TX2 with a Auvidea J121 Carrier board, attached to a square frame chassis attached below the base plate of the robot. A 60 degree angle bracket mount attachment attaches the sensors to the square frame chassis. The Intel RealSense D435 depth camera, used for online mapping, is mounted at 0 degrees, while the Intel RealSense T265 Tracking camera, used as an indoor state estimator, is mounted at 60 degrees downwards to maximize features. The vehicle is elevated from the ground via 4 legs in order to protect the sensors.
Specs
| Weight | 1.14 kg |
| Effective diameter | 30.6 cm |
| Maximum Flight Time | 11 min hover |
| Maximum Velocity | 17 m/s sustained |