
Components
| Frame | Armattan Chameleon TI 6 inch |
| Flight Controller | mRo Pixracer |
| ESCs | Kotleta20 |
| Motors | F80 Pro 1900kv |
| Props | Dalprop 7in 3 blade clear |
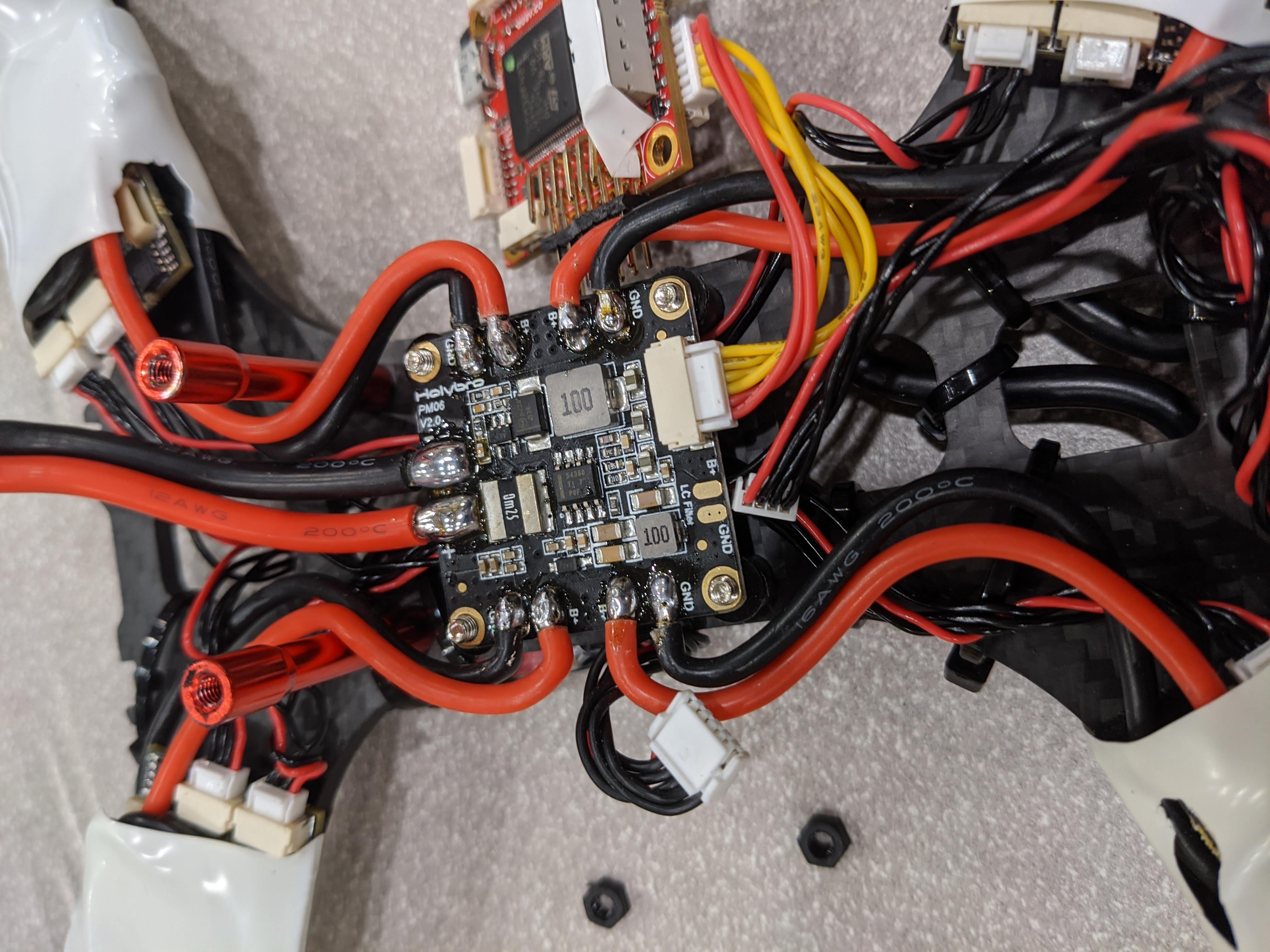
| Power Distribution Board | Holybro Micro Power Module (PM06) |
| Power | Lumenier N2O 1500mAh 4s 120c Lipo Battery |
| Comm | Zigbee Radio |
| Onboard Compute | N/A |
| RC Enabled | N/A |
Gallery



System
Chassis
The vehicle uses an Armattan Chameleon Ti 6 inch mount. For our purposes, we remove the FPV camera mount and the back radio mount, and instead use custom standoffs to hold the upper plate to the base plate, allowing for a higher stack height and reduces unnecessary weight.
Motors + Prop
The motors are T-Motor F80 Pro 1900kv equipped with 7 inch 3-blade dalprop propellers.
Electronics
The flight controller is an mRo Pixracer connected to four separate Kotleta20s ESCs, using the Sapog open source firmware. In our use case, we’re looking for ESCs that allows closed-loop RPM mode. For most FPV drone racing, the lack of Closed-loop RPM requires for the operator to adjust thrust accordingly in order to compensate for voltage changes as the battery depletes. For autonomous flights, having closed-loop RPM allows for precise thrust control. The ESCs are connected to the Pixracer via CAN buses. All components are supplied with power via the Holybro Micro Power Module.
Specs
| Weight | 665 g |
| Effective diameter | 30.6 cm |
| Maximum Flight Time | 15 min hover |
| Max Velocity (3m trajectory) | 8 m/s |
| Max Acceleration (3m trajectory) | 30 m/s2 |